
Svake godine studenti bečelor studija Mehatronike na Mašinskom fakultetu u Podgorici znanje stečeno tokom studija primjenjuju praktično u završnoj godini studija kroz projekte na nekoliko predmeta. Projekti se rade timski, definišu ih predmetni nastavnici, a često i studenti predlože šta bi željeli raditi.
I ove školske godine uradili su više projekata.
CNC PISAČ
CNC pisač (CNC plotter) je projektovala grupa studenata koju su predvodili Luka Radunović i Vuk Bošković. Pisač ima tri stepena slobode za kretanja vretena po tri ose. Ovakav tip CNC mašine koristi se za izradu tehničkih crteža, automatsko potpisivanje dokumenata, simuliranje ručnog crtanja, u modernoj umjetnosti, a uz manje modifikacije može da se primijeni za graviranje, sječenje tanjeg materijala itd.
Ovaj CNC pisač je projektovan i urađen na profesionalan način, i studenti ga mogu kao takvog ponuditi tržištu.
Oprema za CNC pisač je nabavljena od sredstava Mašinskog fakulteta i preko nacionalnog naučnoistraživačkog projekta „Montenegrin Wearable Robots - MWR“ kojim rukovodi doc. dr Milena Đukanović (ETF). Osim rukovodioca projekta istraživači na projektu su i prof. dr Marina Mijanović-Markuš i mr Rade Grujičić sa Mašinskog fakulteta.
MODEL VJEŠTAČKE RUKE
Grupu studenata koja je projektovala i napravila model vještačke ljudske ruke je predvodio Mihailo Vujović. Njihov zadatak je bio da projektuju i realizuju vještačku ruku i da osmisle i projektuju način pokretanja prstiju šake, elektronsko povezivanje senzora, motora i mikrokontrolera i upravljački kod ljudske vještačke ruke. Pokretima ruke, odnosno za sada samo šake, se upravlja rukom čovjeka sa specijalnom rukavicom sa senzorima, tako što vještačka ruka kopira pokrete ruke sa rukavicom. Strukturni djelovi ruke su štampani na na 3D štampaču od PLA materijala. Ključni djelovi za upravljanje i rad ruke su mikrokontroler Arduino UNO, 5 srevomotora za pokretanje prstiju, i 5 fleksibilnih senzora na svakom prstu na rukavici.
Za realizaciju projekta je korišćen 3D štampač nabavljen od sredstava nacionalnog projekta MWR, dok je sva ostala opremu (motori, drajveri, mikrokontroler, senzori i druga sitna oprema) nabavljena od sredstava Mašinskog fakulteta Projekat je predložila nastavnik na predmetu Projekat 1 prof. dr M. Mijanović-Markuš. Sa ovim projektom i Mihailo Vujović je uključen u nacionalni projekat MWR.
AUTOMAT ZA PRAVLJENJE KOKTELA
Grupa studenata, među kojima su Jovica Jelovac, Nikola Šarančić i Ivan Tošić projektovala je automat za pravljenje koktela. Automat ima četiri flaše pića sa dozerima i pokretnu platformu sa čašom za piće, koja se pomjera ispod dozera. Interesantno je da su se studenti potrudili da naprave automat uz minimalne troškove: iskoristili su djelove sa starih štampača i računara, a kupljeni su samo držači flaša sa dozerima! Motore i ostale elektronske djelove je fakultet ranije nabavio za Laboratoriju za mehatroniku.
Za pokretanje platforme sa čašom je iskorišćen klizač sa starog štampača, koji je prilagođen za upotrebu kod automata. Platformu sa čašom pokreće koračni motor preko zupčastog kaiša sa starog štampača. Ventile dozera otvara servo motor sa polugom koja podiže zatvarač dozera. Za upravljanje motorima je korišćen Arduino Mega mikrokontroler sa drajverima za koračni i servo motor. Kućište starog računara je iskorišćeno kao kućište uređaja, koje je, radi stabilnosti uređaja i ljepšeg izgleda, ojačano pločama od iverice. Takođe je radi efektnijeg izgleda uređaja ugrađeno LED osvetljenje. Za napajanje uređaja je iskorišćeno napajanje sa starog računara.
Automat za koktele se može dalje unaprijediti za komercijalnu namjenu.
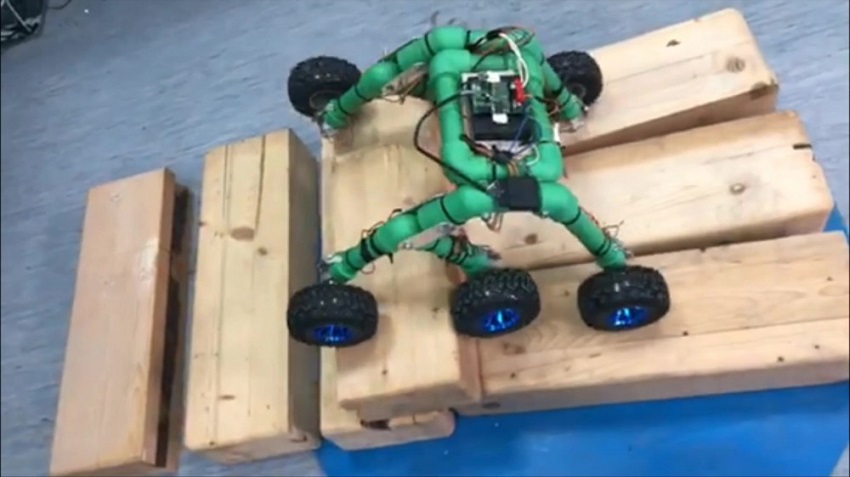
MODEL MARS ROVERA
Bojan Đerković je sa Nikolom Šoćem i drugim kolegama iz grupe napravio pojednostavljeni model Mars rovera kojim se upravlja daljinskim upravljačem. Rover ima tzv. Rocker-Bogie vješanje, koje je posebno interesantno, jer omogućava roverima lakše savladavanje prepreka, npr. stepenica. Studenti su šasiju rovera napravili od cijevi za vodovodne instalacije. Ostala oprema je nabavljena od sredstava Mašinskog fakulteta. Upravljanje pravcem kretanja rovera je diferencijalno, što znači da se točkovi ne mogu zakretati, a skretanje rovera se obavlja promjenom brzine i smjera obrtanja lijevih i desnih točkova.
HUMANOIDNI ROBOT
Humanoidni robot su projektovali i napravili studenati Nikola Draganić, Velibor Bulatović i Mirko Đoković. Ovaj robot je interesantan jer hodanje ostvaruje jednostavnim mehanizmom. Robot ima jedan DC motor, sa kojeg se kretanje prenosi na „noge“ preko tri spregnuta zupčanika. Upravljanje je realizovano preko mikrokontrolera Arduino UNO i drajvera za motor. Čitav robot je napravljen od lima.
Studenti su realizovali još nekoliko projekata kao što je model pametne kuće, uređaj za automatsko uključivanje/isključivanje grijanja ili hlađenja, i druge.
Izvor: ucg.ac.me/mf